Pour en revenir à des posts en page précédente, Jean-Marie, je te propose d'ouvrir un fil "Stepduino3" avec mega2560 et batterie RC et tout le code qui correspond... voire même, et je sais que ça pourrait en intéresser certains, une version qui piloterait trois moteurs pas à pas (XYZ et pas seulement un moteur comme le Stepduino2)
En tout cas, je ne suis que dans les pas de Christian. Je ne peux pas aller plus loin.
(je pense qu'un Uno est suffisant pour le Stepduino2 - c'est aussi moins cher, moins encombrant...)
Sinon, et ça fait la transition avec la suite, il faut aussi tenir compte du fait que la batterie ne sert pas uniquement à l'Arduino, mais aussi elle doit supporter le fonctionnement du moteur pas à pas, sur le terrain, sur une séance (quelle durée ?) et dans mon cas, le moteur choisi est assez "monstrueux".
-------
Le contrôle du moteur pas à pas.
Lors de montages précédents, j'avais acheté une "big easy driver" (chez Sparkfun) et visiblement, malgré l'assistance de Christian, je n'avais pas réussi à contrôler mon moteur pas à pas. Je me suis donc rabattu sur un driver Pololu A4988 (attention, sous la même référence, il y a plusieurs modèles - il faut prendre le modèle "long" avec régulateur de voltage)
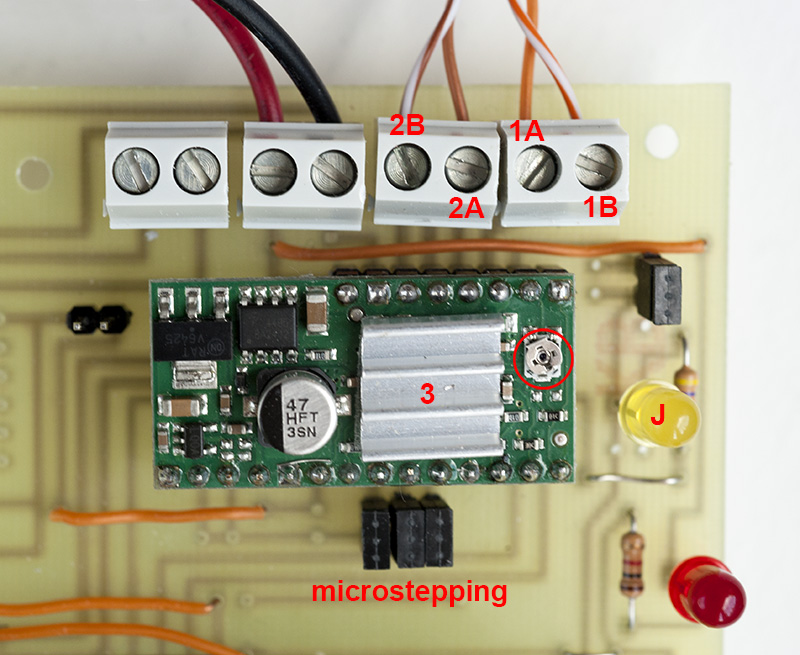
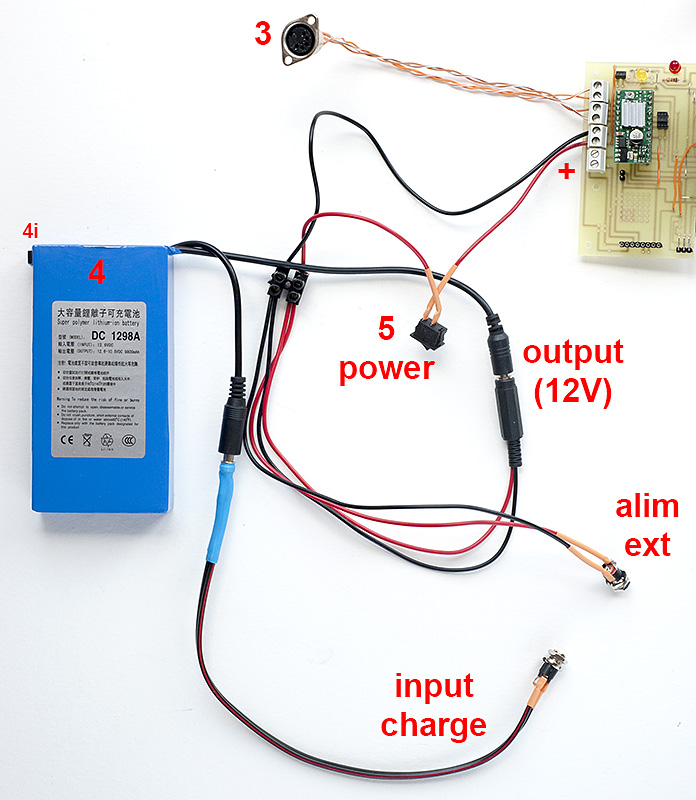
Dans votre commande, il faudra penser à rajouter un dissipateur thermique, à coller sur la puce du Pololu. (le "3" sur la photo)
Christian a rajouté des cavaliers (trois), permettant de faire du microstepping et donc d'envisager d'aller jusqu'au 16ième de pas. Sans en savoir plus, je suppose que quand les trois cavaliers sont mis en place (comme sur la photo), on accède effectivement au 16ième de pas. Sur le terrain, selon la platine micrométrique, je ne suis pas sûr que ça ait de l'intérêt, mais sur une vis micrométrique de microscope, ça permet d'envisager des "steps" de moins de un micromètre. Par ailleurs, via le Stepduino, on peut paramétrer ce microstepping (il vaut mieux que le hard puisse suivre le soft donc j'ai mis les trois cavaliers)
Pour les annotations "1A-1B-2A-2B", ce sont les quatre fils qui rejoignent le moteur pas à pas, selon ce schéma de principe.
Le moteur pas à pas doit être un "bipolaire", à quatre fils (et pas six... mais si vous en avez six (ou cinq), ça peut marcher, à condition de savoir quels fils il faut brancher... il faut alors consulter la datasheet de votre "stepper motor")
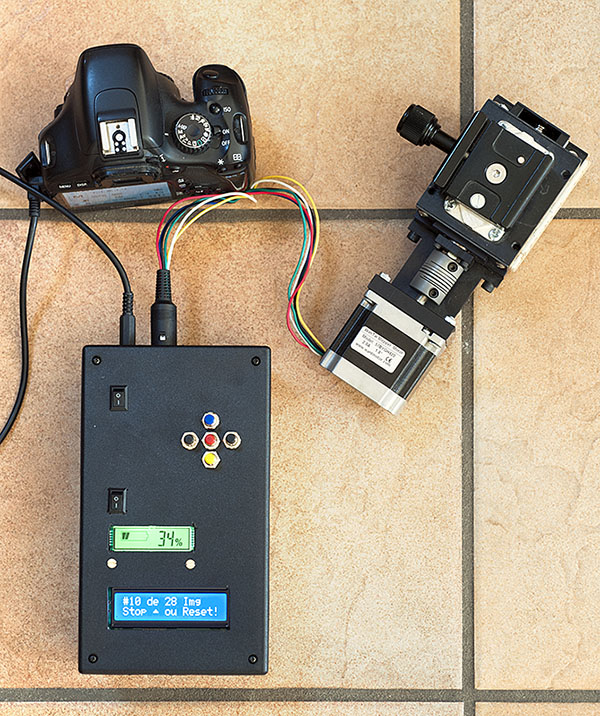
Pour ma part, le Stepduino que je construis est essentiellement destiné au fonctionnement d'une platine équipée d'un gros moteur, un NEMA 23 (voir
ICI) - il lui faut du 2A.
Ce moteur est surdimensionné et je pense qu'un simple NEMA17 voire moins, ça doit suffire.
Juste que dans mon cas, il fallait que le moteur se visse dans ma platine DelTron et qu'en plus, ce moteur puisse déplacer une masse importante (système macro lourd, avec gros reflex, soufflet... mais encore une fois, un NEMA17 ou moins, ça aurait pu aller pour ce qui est du couple)
A l'extrémité des quatre fils, j'ai opté pour de la "din" à 5 broches (quatre étaient suffisantes, mais historiquement, tous mes moteurs pas à pas ont des din 5 broches mâles... donc...)
La planète peut pourvoir aux besoins de tous, mais non pas satisfaire la cupidité de certains (Gandhi)